Malette #1 | Servo Moteurs
Contenu de la malette
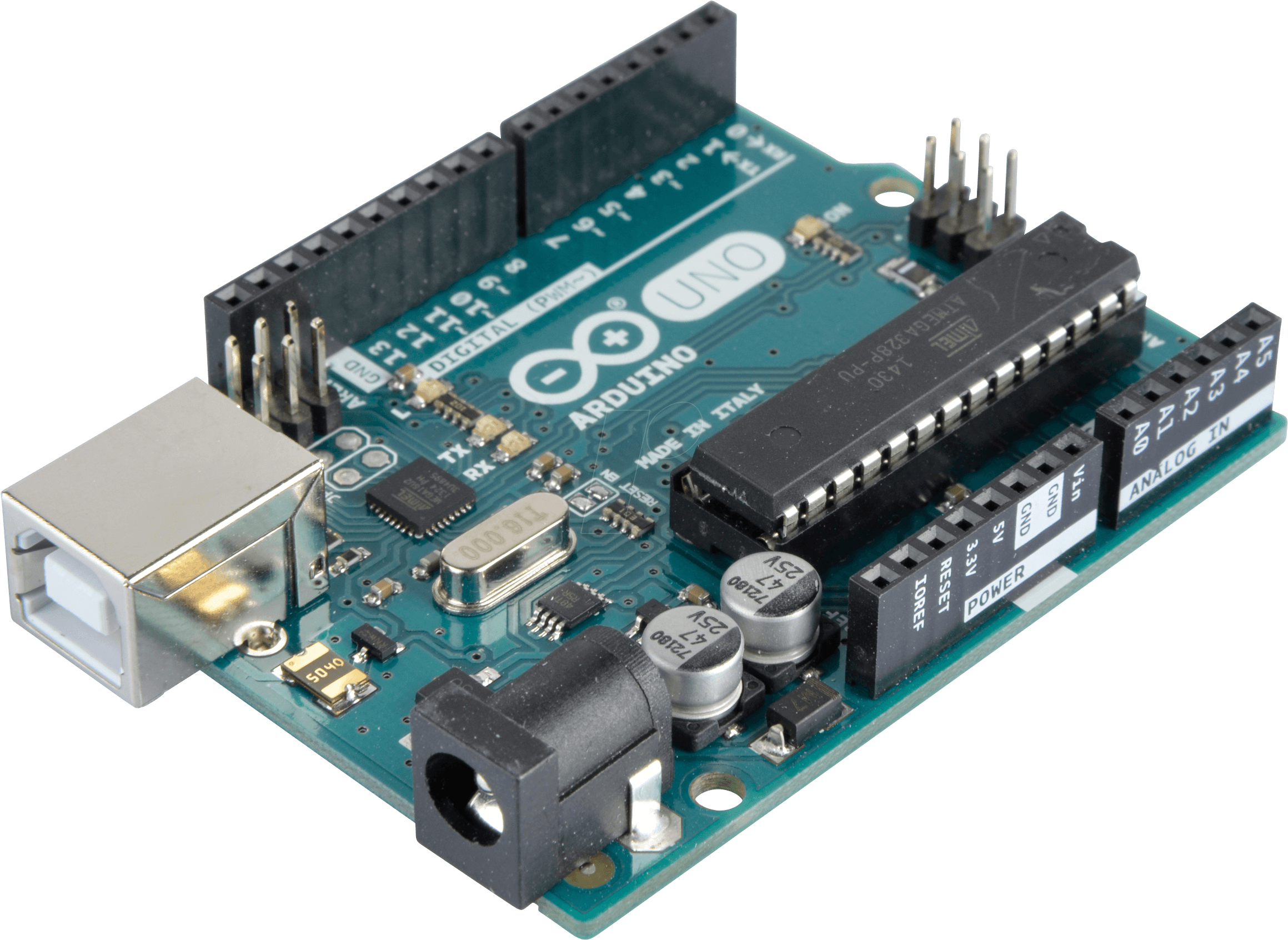
Carte Arduino x1

Servo Moteur x3

Alimentation Meanwell 220V - 5v 3A x1 (pour les moteurs)

Alimentation 5V 1A (pour la carte Arduino)
⚠ Précautions d'usage !
Veillez toujours à ce que l'alimentation des moteurs soit débranchée quand vous téléversez le code sur la carte Arduino. Une fois le code téléversé, débrancher le câble USB de la carte Arduino brancher l’alimentation de la carte Arduino ainsi que l’alimentation des moteurs. Enjoy !
Que’est ce que c’est ? À quoi ça sert ?
Carte Arduino
Ce sont des cartes électroniques programmables (donc dotées d'un processeur et de mémoire) sur lesquelles nous pouvons brancher des capteurs de température, d'humidité, de vibration ou de lumière, une caméra, des boutons, des potentiomètres de réglage, des contacts électriques…
Il y a aussi des connecteurs pour brancher des LED, des moteurs, des relais, des afficheurs, un écran…
Une carte Arduino est un cerveau qui permet de rendre intelligent des systèmes électroniques et d'animer des dispositifs mécaniques
→ Voir plus
Servo Moteur
A la différence d'un moteur continu, le Servomoteur ne tourne pas sur lui-même de façon continu. Un servomoteur tourne certes sur un axe, mais suivant un angle allant généralement de 0 à 180°. Certains peuvent également faire plusieurs tours, on les appelle parfois des servotreuils, d'autre ne vont qu'à 90° maximum ou encore jusque 360°, voir même plusieurs tours sans jamais s'arrêter, on les appelle alors servomoteur à rotation continue.

Le servo moteur s’accompagne de pièces additionnelles, à placer sur son axe pour joindre la rotation du moteur à l’objet ou l’élément à déplacer.
→ Voir plus
Alimentation
Une alimentation électrique est, en particulier, un appareil ou appareillage plus ou moins complexe, destiné à fournir de l'électricité, à partir d'un réseau électrique à un autre appareil. Cet appareil assurant une ou plusieurs fonctions grâce à l'électricité, mais celle-ci doit avoir des caractéristiques en courant, tension et, fréquence spécifiques, sous peine de dysfonctionnement ou pire de destruction.
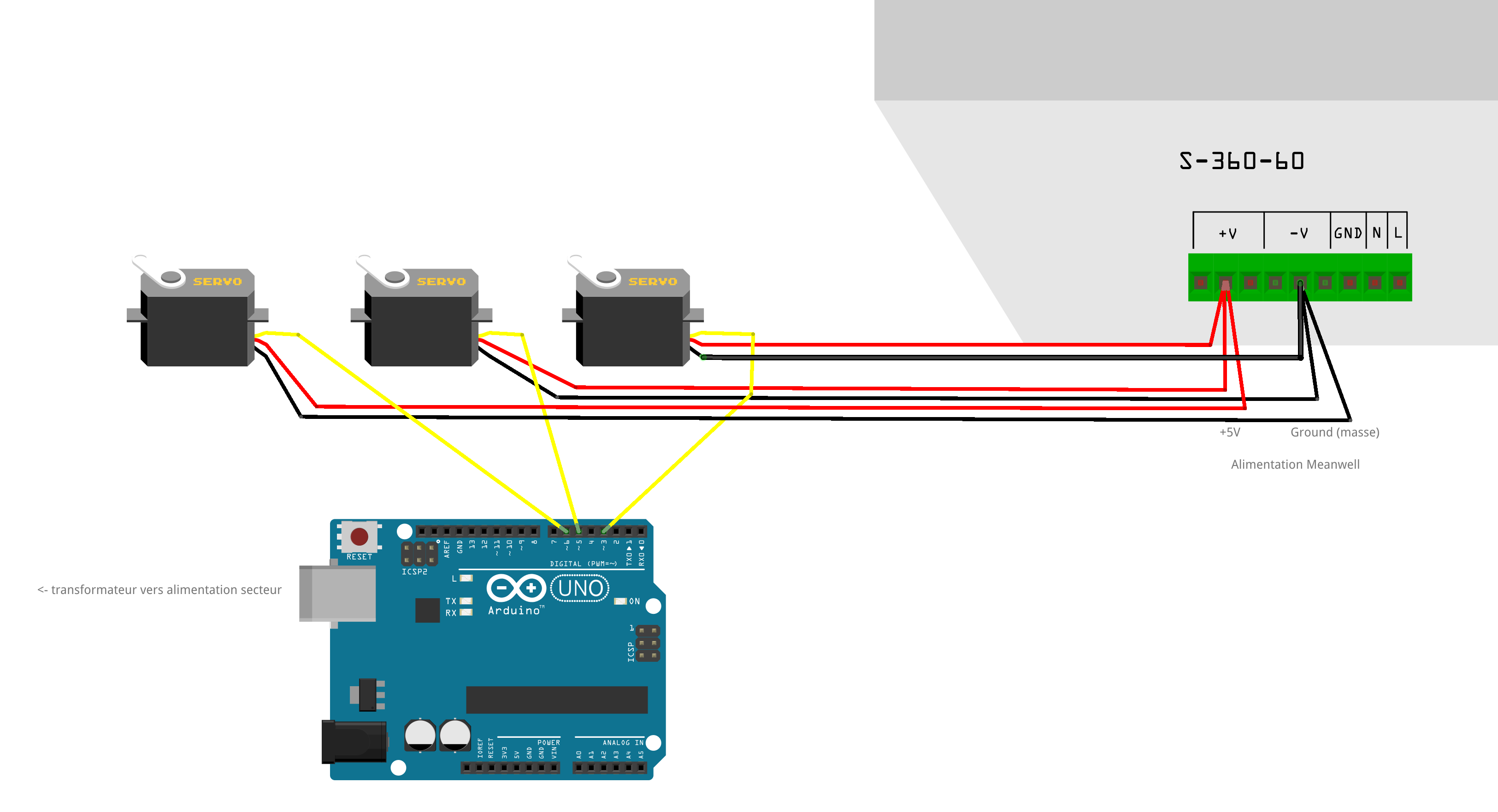
Le câblage de la malette
Dans la malette les servo moteurs sont branchés sur les pin 3, 5, 6 de la carte Arduino, comme indiqué sur le shield.
Codes d’utilisation
Faire tourner un moteur (pin 3)
Pour faire tourner le moteur branché sur a pin 3 dans un sens puis dans l'autre, voici le code correspondant.
# include <Servo.h>
Servo myservo; // créer un objet servo pour contrôler un servo moteur
// douze objets servo peuvent être créés sur la plupart des carte Arduino
int pos = 0; // variable pour mémoriser la position du moteur
void setup() {
myservo.attach(3); // fixe le servo sur la broche 3 à l'objet servo
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // va de 0 degrés à 180 degrés
// in steps of 1 degree
myservo.write(pos); // dire au servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
for (pos = 180; pos >= 0; pos -= 1) { // passe de 180 degrés à 0 degré
myservo.write(pos); // dire au servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
}
→ Télécharger le fichier Arduino IDE
→ Utiliser l'éditeur Arduino en ligne (nécessite un login et l'utilisation de Google Chrome)
Faire tourner les 3 moteursmoteur (pin 3, 5, 6)
# include <Servo.h>
Servo myservo01; // créer un objet servo pour contrôler le 1er servo moteur
Servo myservo02; // créer un objet servo pour contrôler le 2e servo moteur
Servo myservo03; // créer un objet servo pour contrôler le 3e servo moteur
// douze objets servo peuvent être créés sur la plupart des carte Arduino
int pos = 0; // variable pour mémoriser la position du moteur
void setup() {
myservo01.attach(3); // fixe le servo sur la broche 3 à l'objet servo
myservo02.attach(5); // fixe le servo sur la broche 5 à l'objet servo
myservo03.attach(6); // fixe le servo sur la broche 6 à l'objet servo
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // va de 0 degrés à 180 degrés
// in steps of 1 degree
myservo01.write(pos); // dire au 1er servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
for (pos = 180; pos >= 0; pos -= 1) { // passe de 180 degrés à 0 degré
myservo01.write(pos); // dire au 1er servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
for (pos = 0; pos <= 180; pos += 1) { // va de 0 degrés à 180 degrés
// in steps of 1 degree
myservo02.write(pos); // dire au 2e servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
for (pos = 180; pos >= 0; pos -= 1) { // passe de 180 degrés à 0 degré
myservo02.write(pos); // dire au 2e servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
for (pos = 0; pos <= 180; pos += 1) { // va de 0 degrés à 180 degrés
// in steps of 1 degree
myservo03.write(pos); // dire au 3e servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
for (pos = 180; pos >= 0; pos -= 1) { // passe de 180 degrés à 0 degré
myservo03.write(pos); // dire au 3e servo d'aller en position dans la variable "pos"
delay(15); // attend 15 ms que le servo atteigne la position
}
}
→ Télécharger le fichier Arduino IDE
→ Utiliser l'éditeur Arduino en ligne (nécessite un login et l'utilisation de Google Chrome)
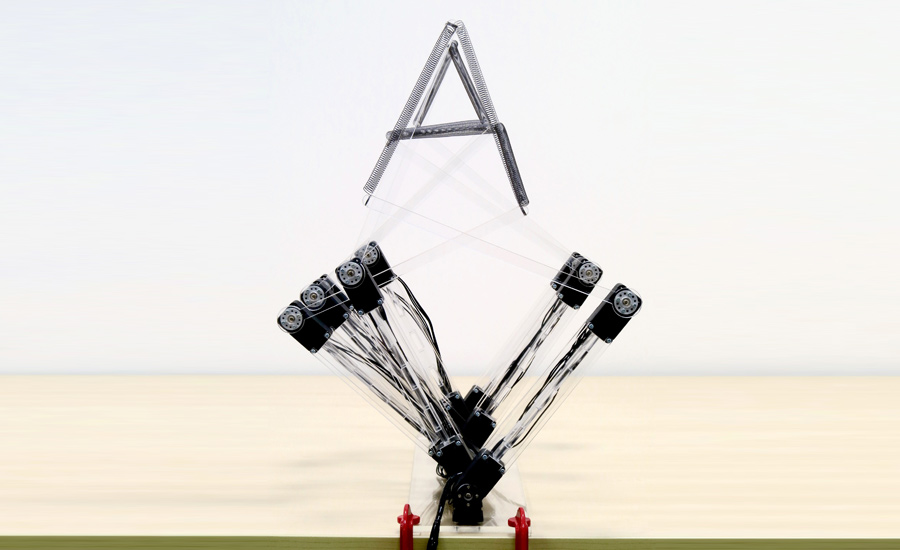
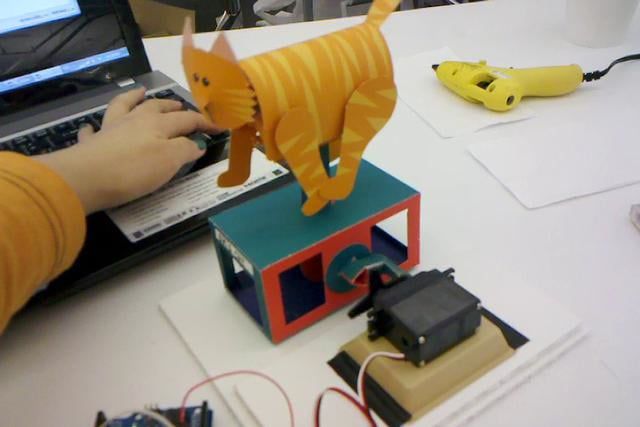
Exemples de projets utilisant les servo moteurs
Isaac Blankensmith, Signal Papers

Yuichiro Katsumoto, Mojingen and Sujingen
Daniel Rozin, Pompom Mirror

Papertoy avec Arduino

Cat Paper Automata
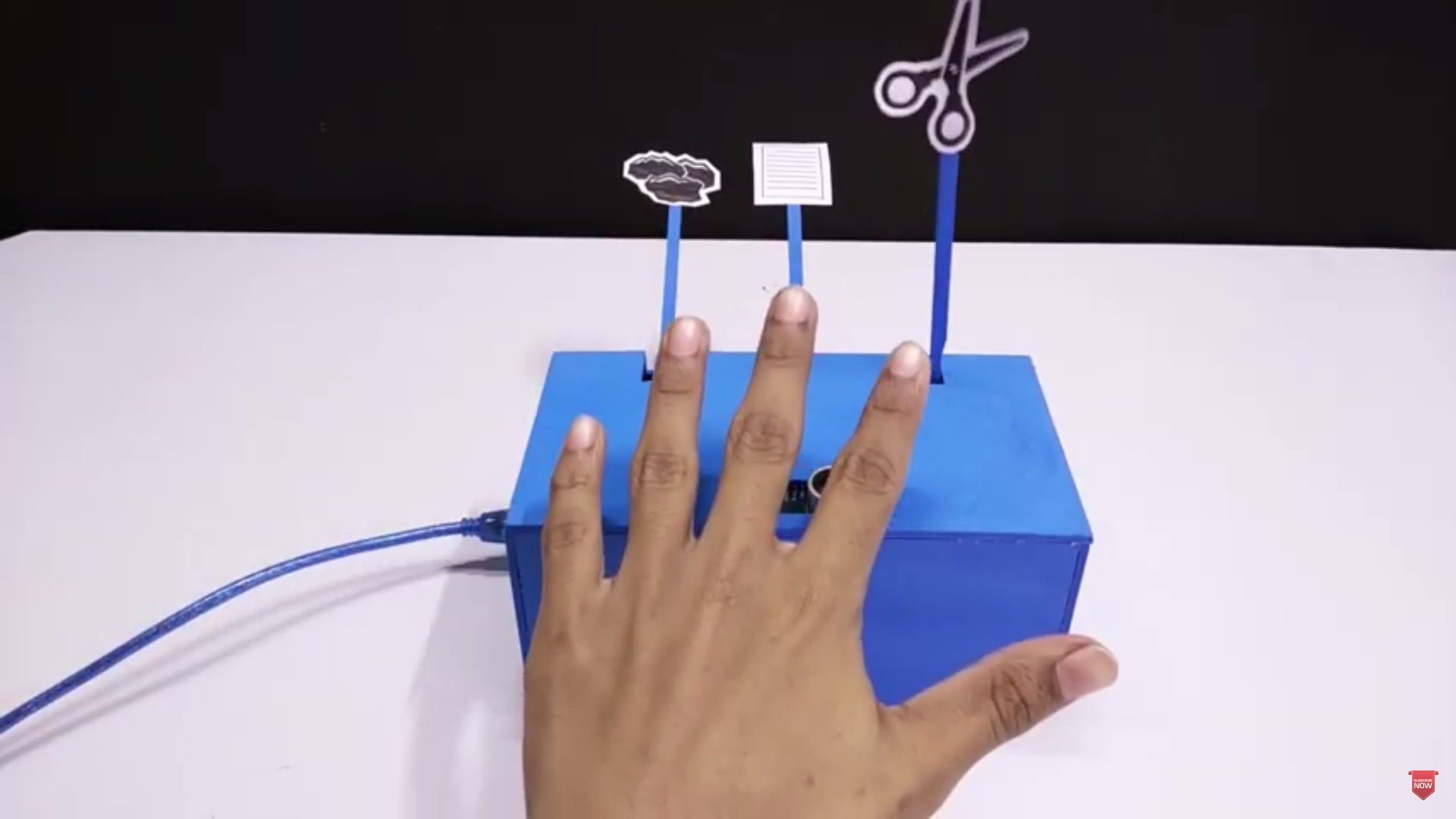
Scissors, paper, rock
Références en ligne
→ Lien
Pour commencer rapidement avec un servo moteur
→ Lien
Un explicatif détaillé de ce que sont les servo moteurs avec des exemples de fonctionnement avec Arduino.

→ Lien
Un exemple d’explication du servomoteur ainsi qu’un exemple d’utilisation